 MiniStadio 13軸ロボットの製作 MiniStadio 13軸ロボットの製作このページをメーカーの人が見るときっと気を悪くするだろうな・・・ まぁ、いいか。初めて作ったロボット、ラジコンも作ったことはないのに。 率直に思ったことを書いていこう。何かの参考になるかも。他にも作るろうとする人が見るかもしれないし、完成できるように。 メーカーの方にも製作記をホームページに載せることを許可してもらいました。メーカーとして問題があればご連絡ください。 

 8月10日 とりあえず買ってみた。 まず箱を開けて・・・すごい状態。箱の中にばらばらと材料が入っている。さすが試販キットというだけある。キット商品になったときにはきれいに入っているのだろう。 説明書・・ない。セットの明細表が1枚。 部品は1~20まで。 どれがどれだかはっきり言ってわからない。写っている写真と実際に入っているものが違う。 ネジたくさんある。本当にこんなに使うのだろうか。 それにしても製作についてのものが全くない。何度か作っている人ならできるのだろうが・・・ とりあえずホームページからマニュアルでも・・・8軸ロボットの製作写真、いったいどこを作っているところの写真なのだろう。 13軸とは違うところがある。13軸の製作写真は・・ない。 ロボットの写真だけ。これを頼りに製作を。 まぁ、作ってみるか。 ①まずサーボモータの改造? サーボモータを軸で動かすためのケースへの交換。 

 ・サーボモータの底面にある4本のネジをはずす。
・サーボモータの底面にある4本のネジをはずす。・ネジを完全に抜き取り、底面のケースをはずす。 ・付属の軸用のケースに交換して、最初のようにネジを締める。 (RB955×2、RB303d×8について同様の改造を行う。RB955については別パッケージになっていた。955の交換ケースは厚い。) ■どうやって付け替えるの?ネジをはずしていいんだろうか。 ■何が違うんだ955と303d?・・・955は金属ギア。どこに使うんだ955。とりあえず足に ■955は、股関節の部分に使うのがベストかな?かなり力がかかりそう。 足の製作 

 ・サーボモータ側面にブロックをネジ止め
・サーボモータ側面にブロックをネジ止め・ブロックには方向がある。(底面からホールまでの長さが違う) ・RB303dは補助ブロックを入れてネジ止めをする。 ・ネジの長さは2種類、補助ブロックを入れた方は3×10、ない方は3×8のネジを使う。 ■足の先から作って、失敗。アングル等の固定ネジが入らなくなる。(もう一度分解) ■製作は、本体(身体)側から作っていくこと。 

 ・身体にサーボモータの取り付け
・身体にサーボモータの取り付け・取り付けは、2×4のビス4本を使う。 

 ・アームブラケットにホーンを取り付ける。
・アームブラケットにホーンを取り付ける。・取り付けは、2×4のビス4本を使う。 
 ・サーボモータにアームブラケットを取り付ける。
・サーボモータにアームブラケットを取り付ける。・取り付けは、中央に3×4のネジ1本を使う。 ■これだけの部分で足を接合しているのか。強度は大丈夫なのか? ■この部分に955を使うのがいいのでは。 

 ・ブロック2個を2×10のビス4本で連結。
・ブロック2個を2×10のビス4本で連結。・ブロックの穴、対角位置の2つを、2.2φ程度のドリルで穴を太くする。 ・上下から2本ずつのビスで連結。 ・サーボモータに連結ブロック、補助ブロックを使ってネジ止め。 ・ビスの長さが2種類。3×10、3×8 各4本。 ・2つのサーボモータを連結する。 
 ・ホーンの組立。
・ホーンの組立。・サーボモータへの取り付け ・黒ブラスチックのある方の向きに注意。皿の部分が外側へくるようにはめる。 ・本体アームアングルにはめてビスどめ。2×4のビス4本。 ・サーボモータの固定。ネジ3×5、センターに1本 

 ・足首部分の直角アングルの製作。
・足首部分の直角アングルの製作。・本当はこの作り方ではないようだが、とりあえずある部品で作成。 ■あまったホーンを中央に挟むのが使うのがベスト ■この時点では、何があまるのかわからない。とりあえず写真は四角いものが使われているので。 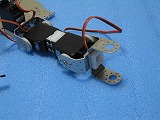
 ・足首部分の直角アングルの取り付け。
・足首部分の直角アングルの取り付け。・サーボモータ、ホーンにビス止め。2×4のビス4本 ・サーボモータの固定、3×5ネジ1本、センターに 

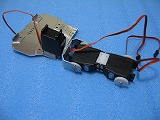
 ・サーボモータの両端にブロックを固定。(補助ブロック不要)
・サーボモータの両端にブロックを固定。(補助ブロック不要)各3×5のビス4本 ・ほんの取り付け、955用にはベアリングが入っていた。 ・足ブラケットに固定、足裏面より3×5のネジ4本 

 ・サーボモータの両端にブロックを固定。(補助ブロック不要)
・サーボモータの両端にブロックを固定。(補助ブロック不要)各3×5のビス4本 ・ほんの取り付け、955用にはベアリングが入っていた。 ・足ブラケットに固定、足裏面より3×5のネジ4本 足の完成 腕の製作 
 ・サーボモータの両端に、ブロック・補助ブロックをネジ止め 3×5,3×8ビス各2本
・サーボモータの両端に、ブロック・補助ブロックをネジ止め 3×5,3×8ビス各2本・本体に、3×5ビスでネジ止め 4本。 ■股関節用サーボと肩サーボが接触する。ぎりぎりネジ止めできる。ちょっと不安。
 ・サーボモータの両端に、ブロック・補助ブロックをネジ止め 3×5,3×8ビス各2本
・サーボモータの両端に、ブロック・補助ブロックをネジ止め 3×5,3×8ビス各2本・本体に、3×5ビスでネジ止め 4本。 ・腕用ブラケットのはめ込み、中央でネジ固定。3×5ビス。 
 ・腕部分のサーボモータを取り付ける
・腕部分のサーボモータを取り付ける・2×4ビス4本。両面より。中央でサーボ固定。3×5ネジ ・腕用プレートの取り付け。 頭の製作 

 ・ホール用の円形ブロックと角形ブロックをネジで固定。2×?
・ホール用の円形ブロックと角形ブロックをネジで固定。2×?・頭部用サーボモータをはめ込み ・本体にネジ固定。3×5ネジ2本。 ■この部分は、1セット入っていた、ラジコン模型のサーボリンクの中にあったものを使うのがベスト 何とか形だけ完成!! PICボードとの接続  PICボードに電源をつないで動作確認。
PICボードに電源をつないで動作確認。キットに電源は付属していないので、とりあえず電池ケースで単3を4本、6Vの電源をつないだ。 ①スイッチon ②ボタンスイッチを、数秒間押す。ランプ点灯。 ③さらにボタンスイッチを数秒間押す。黄色ランプ点灯 動作正常。  ロボットに背負わせて、配線。
ロボットに背負わせて、配線。サーボモーターのコードの接続に注意。茶色のコードが外側に来るように接続。 PCとの接続用コードを向きを間違えないように接続。  電源は、家にあまっていたものをコードを付け替えて接続。 (電池の場合電圧が落ちてくるとモーターのトルクが落ちて動作不安定になる) PCコードは、ノートPCにはRS-232cインターフェースが無いため、USB→RS232cアダプタを使って接続。 |